SYMBITRON
Concept
SYMBITRON is designed to overcome the existing technical limitations, to enhance the state-of-theart knowledge on walking, balance and man-machine interaction, and thereby to bring independent walking with tailor-fitted, wearable exoskeletons within reach of the patient. Therefore we propose a patient- instead of a technology-driven methodology in which the design and control of the wearable exoskeleton and the interface between the exoskeleton and patient are customised to the unique features (not only impairments but also remaining capacities) of each individual patient. Our ambition is to give each personalised exoskeleton human-like neuromuscular properties resulting in a paradigm shift in the field of robot-assisted living.We aim to restore natural symbiotic interactions between the paralysed legs and the rest of the body, by optimising tailor made biological inspired wearable exoskeletons and symbiotic man-machine interactions. With this novel approach we expect a breakthrough in the achievements and application of wearable exoskeleton technology for people with gait disorders.
Objectives
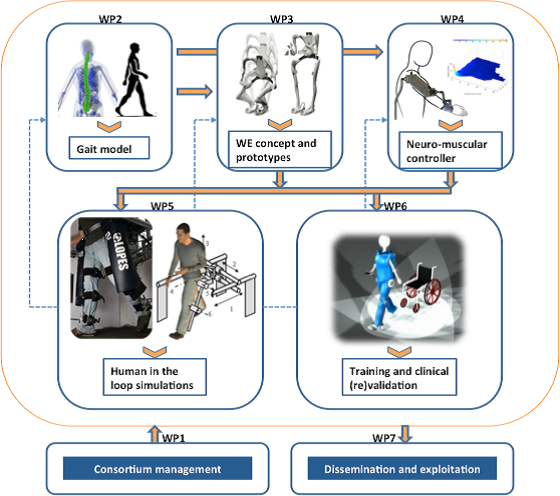
- Objective A: To develop an integrated neuromuscular model that describes the physiology of healthy versus impaired human gait. (WP2)
- Objective B: To design and manufacture personalised modular exoskeletons that compensate for SCI impairments. (WP3)
- Objective C: To develop personalised human inspired neuromuscular controllers for the wearable exoskeletons. (WP4)
- Objective D: To optimise the design &control, and bi-directional symbiotic man-machine interaction of wearable exoskeletons (WP5)
- Objective E: To determine the safety and functionality of the personalised SYMBITRON wearable exoskeletons in a clinical study. (WP6)
- Objective F: To disseminate key findings to relevant stakeholders and to secure IP protection and exploitation of valuable innovations. (WP7)
- Objective G: To monitor the progress of work towards the milestones and objectives of the work plan and to ensure compliance to the contractual obligations of the Consortium towards the European Commission. (WP1)
Links
- Project website: http://www.symbitron.eu/
Student Projects
Open positions:
- Mechanical Design of a Bio-inspired Ankle Foot Orthosis for SCI Paraplegics
Ongoing
Past
Student Projects
Open positions:
- Mechanical Design of a Bio-inspired Ankle Foot Orthosis for SCI Paraplegics