
A Biomorphic Whisker Sensor for Aerial Tactile Applications
Drones have traditionally been considered as “eyes in the sky”, that can move in three dimensions and need to avoid any contact with their environment. On the contrary, contact should not be considered as a problem, but as an opportunity to expand the range of drones’ applications. In this paper, we designed, fabricated, and characterized a whisker sensor unit based on MEMS barometers, suitable for tactile localization on drones. The main features of our design are low weight, low stiffness, high sensitivity, a broad sensing range, and scalability. Then, for the challenging task of contact point localization, we propose a Recurrent Multi-output Network (RMN) for predicting 3D contact points under continuous contact conditions to address the problems of non-linearity, hysteresis, and non-injective mapping between signals and contact points by considering time series.

The results show that our localization can achieve excellent performance, with an inference time of 1.4 ms and a mean error of only 9.18 mm in Euclidean distance along the whisker length, laying a solid foundation for future implementation of aerial tactile localization on drones. This work was led by PhD candidate Chaoxiang Ye of the BioMorphic Intelligence Lab.
Whiskered Drones
Whereas most work in the literature has focused on ground robots, tactile interaction can also be beneficial to flying robots. Whiskers for aerial-tactile applications require different set of attributes than ground robots: 1) a lightweight and compact design that has minimal impact on UAV battery life; 2) low stiffness to enable gentle and non-intrusive interaction with the environment thereby minimising contact-induced forces; 3) a broad sensing coverage to prevent airborne collisions; 4) high sensitivity to contact in both non-intrusive and long-range situations; 5) high resolution and rapid response time for real-time functioning; and 6) robust contact point localization performance so to infer correct navigation decisions.
Challenges in whisker-based contact point localization
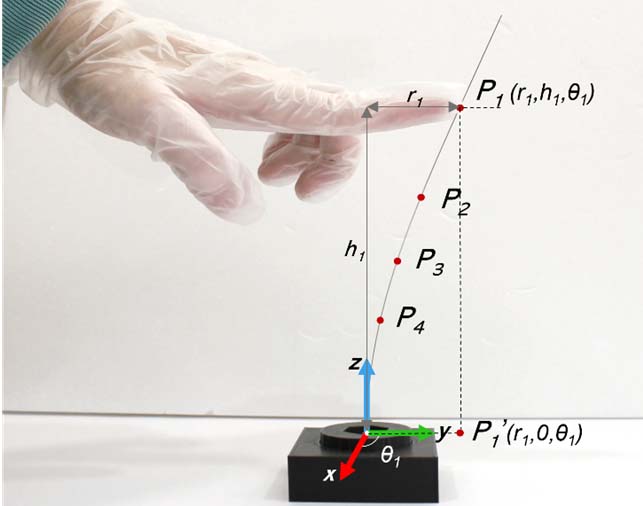
Whisker sensors, being soft sensors, are crafted from deformable materials to ensure gentle interaction with objects, minimizing stiffness. However, this softness introduces challenges such as non-linearity and hysteresis in response. Moreover, the acquisition of three pressure signals from the follicle structure allows a close correlation to be established with two bending moments, Mx and My. While this can calculate whisker deflection, it leads to a non-injective mapping due to multiple contact locations P1, P2, P3, and P4 producing the same deflection and sensor signals.
Implication of whisker-based aerial tactile application
Whiskers can enhance UAVs’ sensory capabilities on obstacle avoidance, localization, navigation, and even mapping through physical interaction with the environment. These advanced functionalities can empower drones to autonomously navigate through challenging environments via non-intrusive tactile feedback.